Flamingobot Design
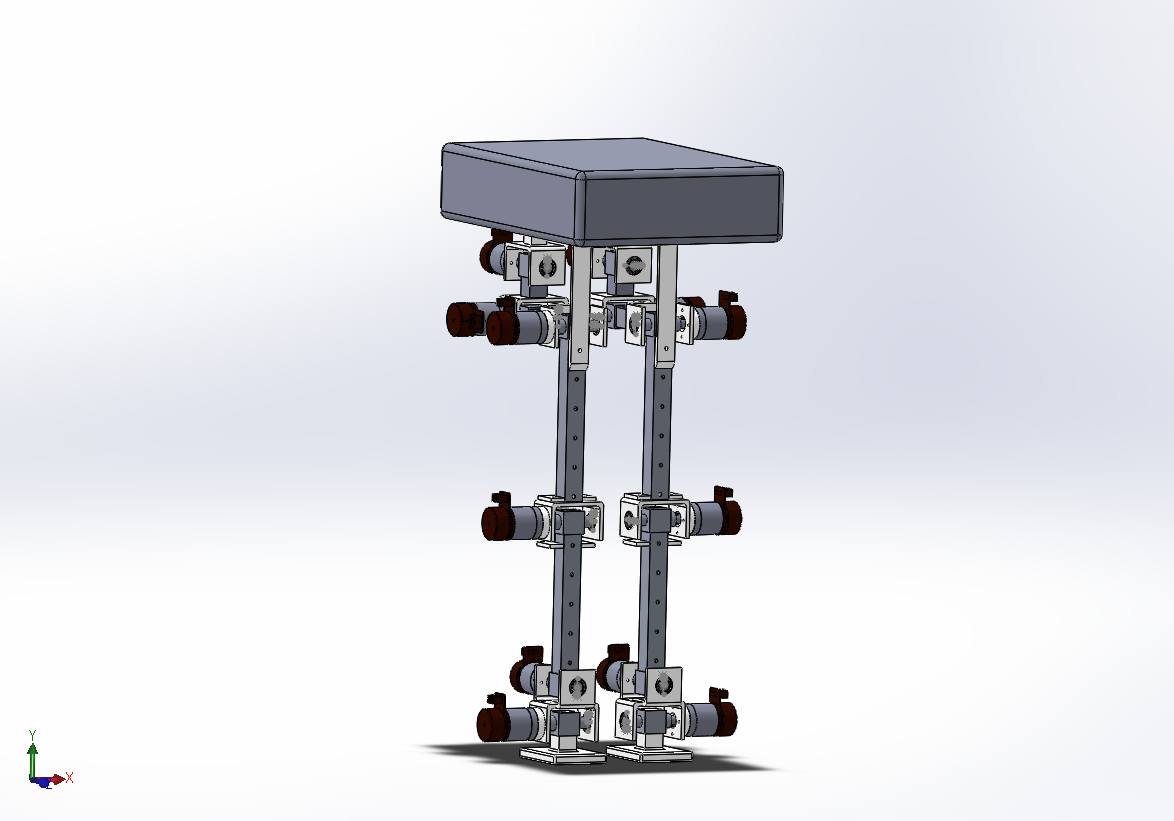
During the spring of 2020 I assisted my lab group with the design of Flamingobot in order to account for the new motors that we ordered. I went through numerous iterations focusing on mass optimization and passive stability.
During the spring of 2020 I assisted my lab group with the design of Flamingobot in order to account for the new motors that we ordered. I went through numerous iterations focusing on mass optimization and passive stability.
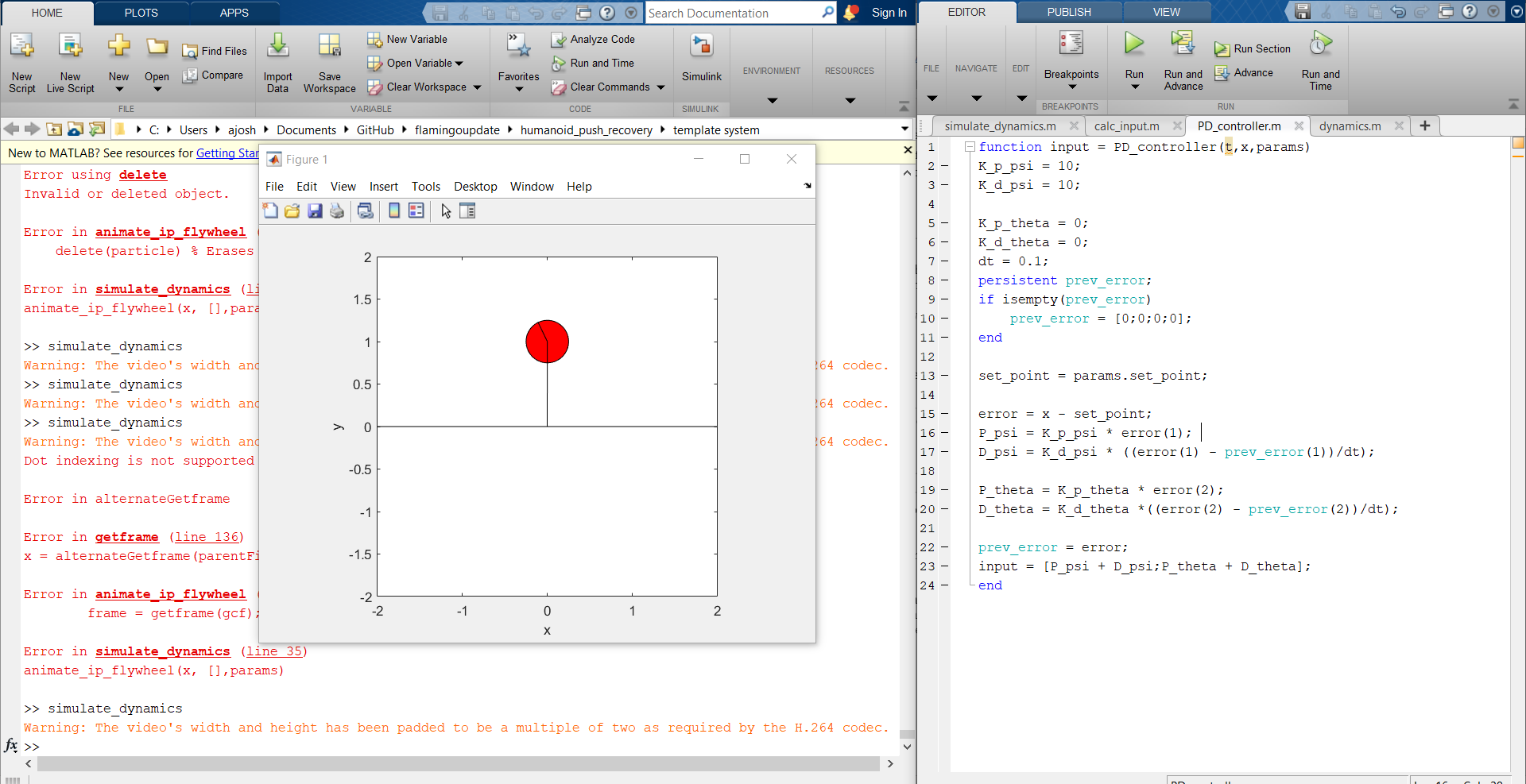
During the summer of 2020 I worked on the control aspect of flamingobot. I worked with a simplified model template in Mujoco and MATLAB and used optimal control to mimic humanoid push recovery behavior. We aimed to create a design methodology for bipedal robots by analyzing control policies generated from simplified robot dynamics.